End Effector Camera Gimbal
Current Status: Post-FDR; Active Manufacturing Phase.
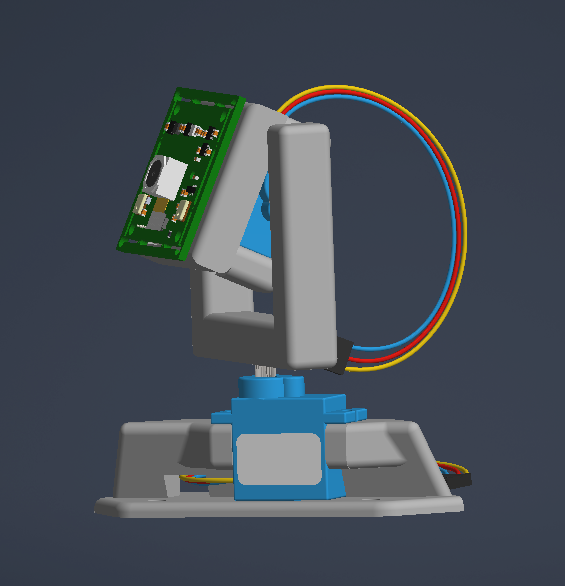
Project Overview: I am responsible for the design and fabrication of a 2-DOF gimbal system mounted on the Mars Rover’s end effector. This system is engineered to provide a stabilized, high-definition video feed for remote operation during sample collection and the various end effector tasks in the University Rover Competition. The gimbal contains a base mount, holder, and camera plate, which can house a 8MP 4K HD Arducam, with proper allowance for wiring and proper integration with the other systems.
Final Design Review (FDR): Successfully led the gimbal subsystem through the team’s FDR process, defending the mechanical architecture and component selection to team leads and alumni who are engineers/masters students.
Mechanical Design: Developed the assembly in Autodesk Inventor with a focus on minimizing size and mass and ensuring rigid mounting points for the camera.
Change: Currently the reference image shows a 3D printed gimbal base, but this design has been changed to be a single sheet metal part with 2 bends (manufactured with SendCutSend) to reduce complexity and weight while also increasing durability. Additionally, a cover for the camera will be made after it is properly tested at the beginning of the spring 2026 semester.
Technologies Used: Autodesk Inventor, Autodesk Vault