5-DOF Rover Arm CAD Project
Over the summer of 2025, I decided to make a few projects to further my skills in the engineering field. One such project was my 5-DOF Rover Arm in Autodesk Fusion 360.
I chose a rover arm as the project because of my interest in aerospace engineering and eagerness to start excelling in the field. As implied, I started this project with no CAD experience whatsoever.
At first I didn’t know much about designing anything that had moving parts, so the first rover arm I made failed as there were too many joint issues. The second one I made was much more successful, but it was very simple and had only 1 translational and 2 rotational DOF’s. The next rover arm I made more closely resembled my final one, as it had 5 DOF’s as well, but the way I designed the joints severely restricted its movement and the design wasn’t very practical as it couldn’t grab something that was close to it at all. Also the claw design was pretty simple and likely couldn’t carry a variety of objects. Using all my design flaws and learning experiences from my previous designs, I more meticulously planned out my final design on paper, part by part, ensuring that it had enough range and that the problems from the previous design were fixed. Despite all my planning, a lot of the design was particularly difficult to design in Fusion 360, and I had to learn almost all the tools from the solid section and many tools from the surface section. But in the end, I was able to design the arm the way I wanted despite the hardest sections (the wrist and the claw) which involved complex lofts and joinery.
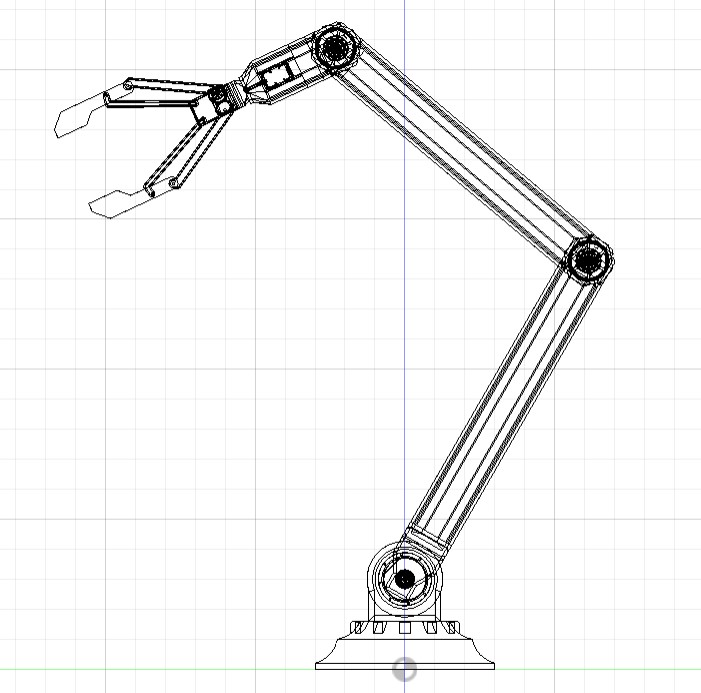
The Arm features a sturdy base to attach to the Rover, a base arm and forearm, and a wrist and claw. The base arm and forearm are both hollow to allow for wiring and power supplies, but the entirety of the arm was not created with these factors (because it would become too complex). Besides that, the base arm and forearm are pretty standard, but the wrist and claw have some interesting features. The wrist houses the motor to rotate the claw about the axis normal to the top surface of the wrist (z-axis if the arm were standing straight up), and also adds a degree of freedom to the arm. The claw features a 4-bar linkage system to effectively grab objects and hold onto them tightly (powered by a high-torque motor) while also keeping the fingers of the claw in the same vertical orientation (parallel to the z-axis).
The following images are additional renderings of the arm from Fusion’s ‘Render’ Workspace:


Technologies Used: Autodesk Fusion